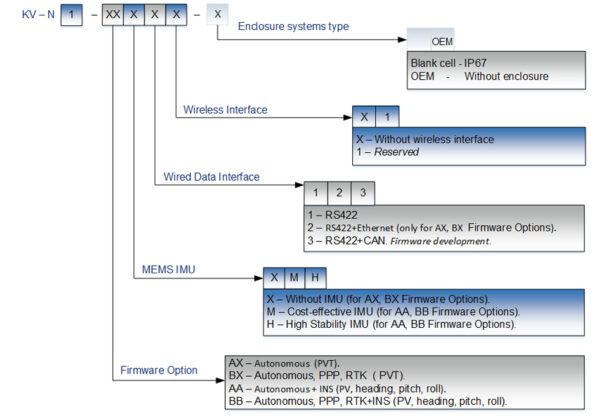
The Newton-1 products line is represented by the high performance multi-constellation multi-frequency GNSS Receivers that are capable of PPP, RTK, INS Engines, offering flexible positioning capabilities and expanding the application area: from standard accuracy GNSS Receiver to high performance high accuracy GNSS-Aided INS Receiver (GNSS+INS Receiver).
GNSS receivers provide reliable and accurate positioning using multi-frequency multi-constellation GNSS technology. The performance of GNSS receivers is improved by regional Satellite Based Augmentation Systems (WAAS, EGNOS, GAGAN, MSAS, SDCM and other SBAS-compatible services). The RTK and PPP are the powerful technology that are used to provide highly accurate navigation data.
The robust loosely-coupled GNSS+INS integration algorithm allows the real-time fuse of GNSS data and IMU data by Extended Kalman Filter to provide optimal estimates of Position, Velocity, and Attitude. The GNSS+INS Receiver is ideal solution for application requiring continuous positioning even in GNSS-denied environments.
In addition to the increasing positioning availability under the most demanding conditions and high data update rate, the high performance GNSS-aided INS provide full object’s orientation – Attitude (Roll, Pitch, Yaw/Heading). The Newton-1 supports the variety of MEMS IMUs and can be performed on Cost-effective IMU or High Stability IMU. The use of PPP and RTK Engines makes the position estimation more accurate for such receivers.
The full access to raw GNSS measurements (Pseudoranges measured by code and carrier phase, SNR, Doppler) and IMU data (raw accelerometer, raw gyro, temperature) allows data collection for their post processing (PPK) providing greater device flexibility and more capabilities for the user.
GUI (available for free download) provides a software tool for easy setup, configuration, and data logging or viewing.
For integration into existing equipment, OEM version is available (without enclosure).
Our technical support team will help make using our products as easy and straightforward as possible.
If you would like more information about this product, please contact us by completing our GET QUOTE form.
TECHNICAL SPECIFICATIONS